
A Mandatory About Me!
I work as an Associate Professor at the Department of Information Technology at ABV-IIITM Gwalior. I am a member of the Center of Autonomous Systems, which has recently opened and plans to do exciting research in intelligent vehicles and robotics. I am also a member of the Computer Vision and Multimedia Laboratory hosted at the Department of IT. I primarily teach and conduct research in robot motion planning, SLAM, intelligent vehicles and others.
Autonomous Mobile Robots
Great learning also comes in gigantic packages!
Autonomous Mobile Robots: Planning, Navigation and Simulation, published with Academic Press, an imprint of Elsevier, is one of the thickest books in robotics, with 1,088 pages of delicacy that took over 4 years of craftsmanship. Its enormous size makes it a perfect piece to impress your mates, practice weightlifting as you learn, and get one of the most comprehensive coverage of robotics and motion planning.
I had the pain of teaching robotics courses to all kinds of students, from the most brilliant ones to the most challenged, with a commonality of no robotics background and, in some cases, not even a CS background. Those silly questions made interesting stories and now (hopefully) an exciting book! Of course, no book covers all backgrounds, making teaching hard, so I had to write one for them, further specialising in the unending domain of motion planning. The project students were equally curious cases, where students would take ambitious robotics projects with no background, like planning to make a unicorn in a semester. So, a book had to be written to get the kids into the playground quickly (background chapters), after that enabling them to choose the method (chapter) of choice.
The book covers the entire syllabus of the Robot Motion Planning, Foundations of Robotics, and Swarm and Evolutionary Robotics courses, each of which was taken multiple times before being a part of the book. The students never allowed extra classes for the supplementary topics, ideally to be included before or after the main topics, but no one stopped me from putting it all here (except for the publisher repeatedly worrying about the print length, who was easy to handle). The students had to be continuously threatened by marks to do the lab, negotiating the lab topics more fiercely than convincing funding agencies for funds. Obviously, here, I had the liberty to populate the hands-on to the level of the coverage. The resources are being updated and will be populated with time. A famous disclaimer: You do not need real robots to work in robotics. Simulators (covered in this book) work beautifully, the videos of which get a lot of likes on social media without costing you a penny. If you are doing a course adoption, please reach out to me.
While scientific books come with lots of equations and jargon, this one is based on intuitions and story-telling and comes with many pictures, examples, boxes, exercises, and software references. If preparing a day before the exams, the boxes, tables, figures and the surrounding text are enough.
Interestingly, the domain changed dramatically over the 4 years when the book was being written, especially with the use of learning-based approaches and vision advancements related to SLAM. So, a completion celebration was often followed by a new list of homework. A challenge was, therefore, to have more writing phases to fully document the ever-expanding approaches before it took a comprehensive shape in the form of this book.
Please do get a copy, share a review, and suggest feedback to make the future editions better.

Short Biography
Rahul Kala received the B.Tech. and M.Tech. degrees in Information Technology from the Indian Institute of Information Technology and Management, Gwalior, India in 2010. He received his Ph.D. degree in cybernetics from the University of Reading, UK in 2013. He is currently working as an Associate Professor in the Department of IT at the ABV-Indian Institute of Information Technology and Management, Gwalior, India. He is a member of the Center of Autonomous Systems and the Computer Vision and Multimedia Laboratory. He was previously with the Indian Institute of Information Technology, Allahabad from 2013-2023. He is the author of five books and over 150 papers. He has numerous funded projects from Government agencies and industry to his name. He is an active reviewer of leading journals of the domain. He is a recipient of the Early Career Research Grant from the Department of Science and Technology, Government of India. He is a recipient of the Best PhD dissertation award from the IEEE Intelligent Transportation Systems Society; and a scholarship under the Commonwealth Scholarship and Fellowship Program from the UK Government.
Areas of Research
Details

Socially-Aware Motion Planning using Learning-based Techniques

Multi-Robot Motion Planning and Multi-Robot Systems
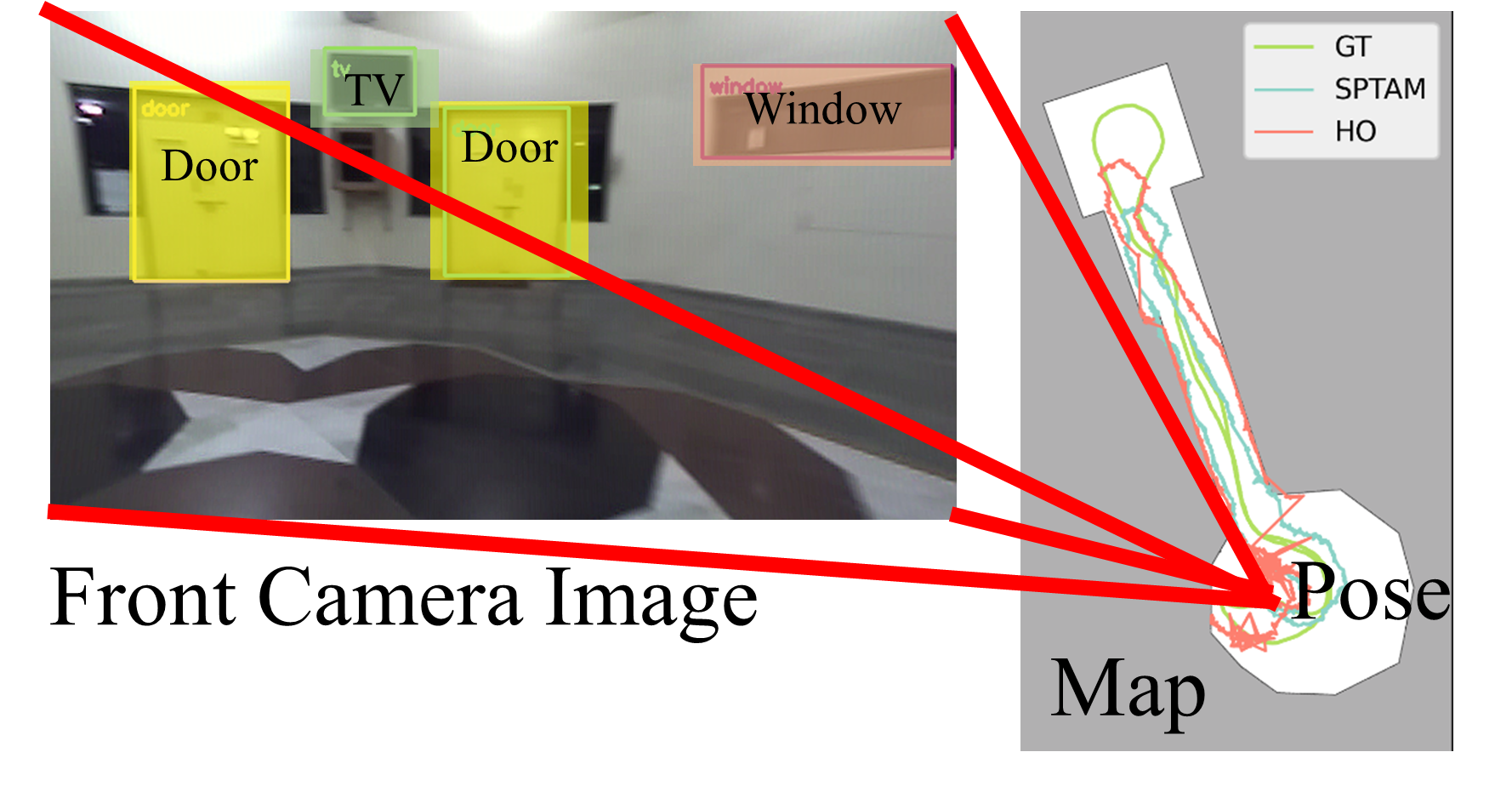
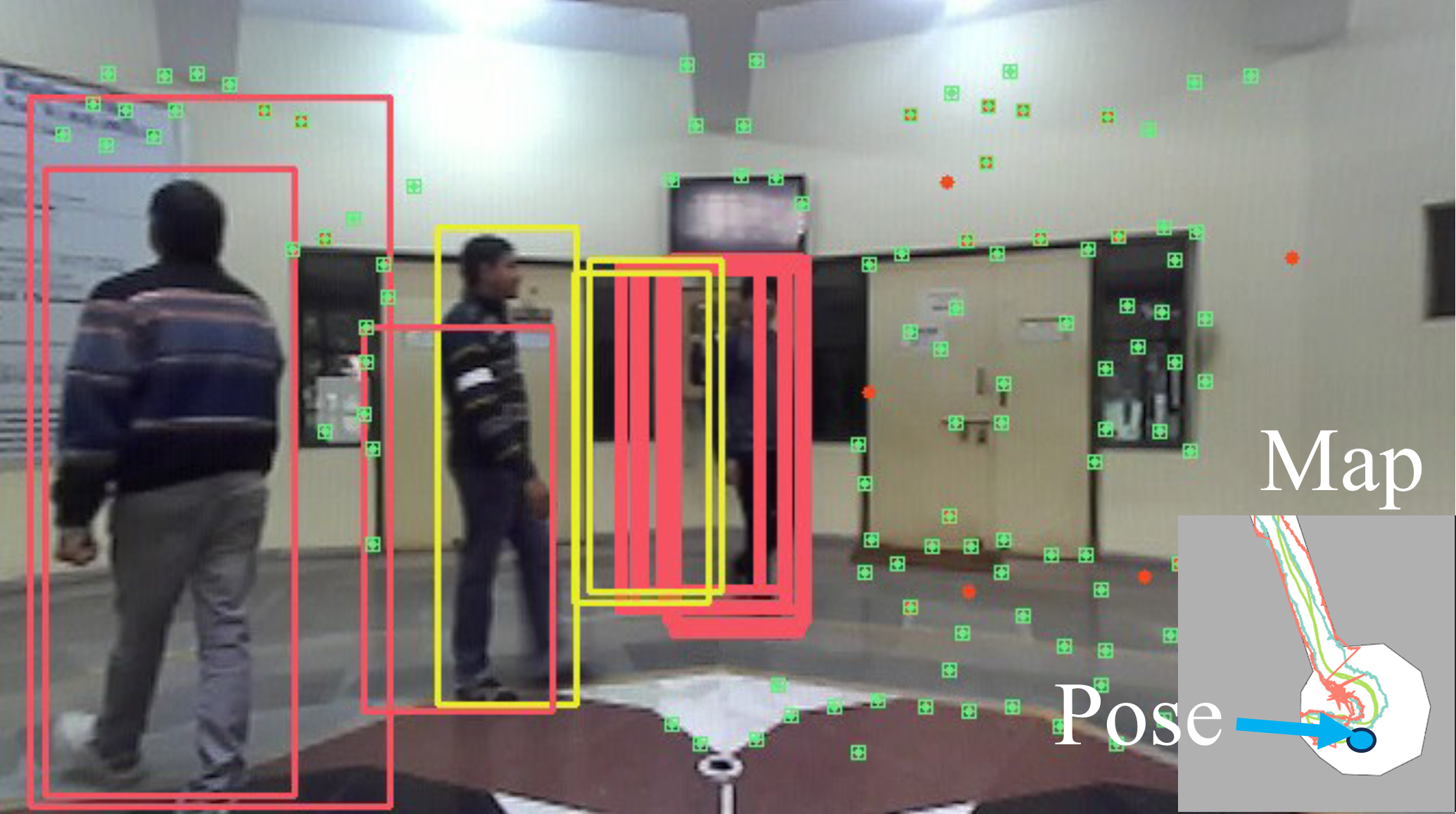
Simultanious Localization and Mapping (SLAM) using Semantics and Visual Place Recognition

Autonomous Vehicles & Intelligent Transportation Systems
Funded Projects
Details

Intelligent Grasp Manipulation Technology Development in a Cobotics Framework Using Complex Manipulation | IHub Foundation of Cobotics

Safe Human-aware Robot Navigation in Warehouses | IHub Foundation of Cobotics & NSF | In collaboration with the University of Illinois Urbana-Champaign

Medical Cyber Physical System for lifestyle diseases using Big Data Analytics | DST | In collaboration with UBL Indonesia and UTM Malaysia
Self-Learning Maps for Self-Driving Cars for Urban Scenarios | NavAjna Technologies Pvt. Ltd. | In collaboration with Mercedes-Benz Research & Development India

SLAM for Extreme Weather Conditions | NavAjna Technologies Pvt. Ltd. & PMRF

Mission Planning using Sampling based Techniques | DST














Courses Taught
Postgraduate-level
- Robot Motion Planning
- Artificial Life Simulations
- Humanoid Robotics / Foundations of Robotics – II
- Foundations of Robotics / Robotics and Industrial Automation
- Machine Learning and Autonomous Systems
- Computational Intelligence
Under-graduate Level
- Artificial Intelligence
- Data Structures
- Design and Analysis of Algorithms
- Object Oriented Methodologies
- Principles of Programming Languages

Contact
Address:
Room No. A-118, A Block,
Department of Information Technology
ABV-Indian Institute of Information Technology and Management, Gwalior,
Morena Link Road,
Gwalior, Madhya Pradesh – 474015,
INDIA
Telephone:
+91-75210 50744
Email:
rkala@iiitm.ac.in, rkala001@gmail.com